 |
|
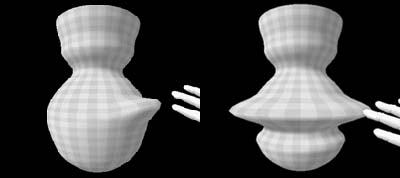
| a) 局所的な操作 | b) 回転体の径方向への操作 |
3.仮想空間における対話的形状操作
3.1 VRシステム
本研究で用いたVRシステムはINTERGRAPH社パーソナルワークステーション(TD-30)にアクセラレータボードやビデオボードを搭載し,入出力機器にサイバーグローブそしてクリスタルアイを備えたシステムである。構成を図8に示す。また,ソフトウェアは米国SENSE8社のWTK(World
Tool Kit)であり,VRを実現するために650近いC関数ライブラリを持っている。
3.2仮想空間上のオブジェクトに対する形状操作
オブジェクト(仮想空間上の物体)に対する形状操作は,図9に示すように,サイバーグローブの指先が触れた物体の一部分を変形させる局所的な形状操作と回転体の径方向に一様に変形させる形状操作とが可能である。ここでは,変形が複雑な局所的な形状操作について述べる。
|
|
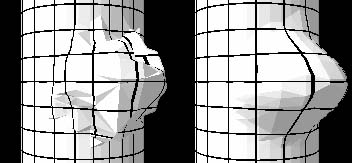
| a) 局所的な操作 | b) 回転体の径方向への操作 |
3.2.1 形状操作のための前処理
本システムにおいて形状操作の対象とする物体は,回転体の断面形状を定義し回転させることにより,伝統工芸品をイメージした壷状の物体(以下,モデリング物体とする)と,前章での計測で得られた物体(以下,計測物体とする)である。どちらも,Y軸と平行な軸をもち,その軸を含む平面が物体表面と交差するライン上にサンプル点が並んでいる。
計測直後の3次元座標データは,補間により点を補うため,各スリット光のライン毎にサンプル点の数が異なっている。VRでの形状操作を容易にするため,計測データの各ライン上のサンプル点数を統一する。まず,データ上の隣接する3次元座標値をそれぞれ結び,任意のサンプル点に対し,隣接のサンプル点とのなす角や,長さを調べ物体の平坦な部分のデータを間引く,更に,各スリット光のライン毎に含まれるサンプル点合計の最大値をパラメータとし,B-スプライン関数により,各ラインのデータ数を等しくする。
モデリング物体は,1本の曲線を回転させることで初期形状を作っているので,サンプル点が図10のように等間隔に格子状に格納されている。それに対して,計測物体は計測によって得られたサンプル点が各ライン毎に不規則に格納されている。そこで,縦方向の変形範囲は,変形の中心座標からのY成分の距離で指定する。また,モデリング物体,計測物体共に各ライン毎の角度は,等間隔である。そこで,横方向の変形範囲はラインの数で指定する。図11にライン毎のサンプル点の座標値が不規則である物体に対して,縦方向の範囲をサンプル点数で指定した場合と,Y成分の
距離で指定した場合の違いを示す。
3.2.2 変形用パラメータの決定
形状操作には,変形の位置,範囲,大きさ,方向などのパラメータが必要となる。ここでは,これらのパラメータの決定方法を示す。
サイバーグローブと物体との接触判定は,各指で行うことも可能だが,処理時間が掛かるため表1のように,指定した1本の指で行う。また,範囲パラメータmの決定は,図12ように,伸ばしている指の本数を用いる。サイバーグローブのローカル座標系は,Z軸を指と平行に設定し,XZ平面を手の平と平行に設定する。範囲パラメータmは,X軸方向の指の幅2を単位として決定する。
|
表1 指の本数と変形範囲
|

変形範囲の縦横の比率を手の角度によって決定する(図13)。ここでの縦方向の変形範囲maはY成分の距離であり,各ライン上のY軸方向で範囲内のサンプル点を変形に含む。また,横方向の変形範囲mbはラインの本数であり,範囲内のラインを変形に含む。式(13)では,物体のローカル座標系(Xt,Yt)と,グローブのローカル座標系(Xh,Yh)のX軸のなす角θと,範囲パラメータmより縦方向の変形範囲maを求めている。式(14)では変形範囲の角度γを求めている。γの決定例を図14に示す。式(15)では前式で求めたγをラインの刻み角度γ0で割る事で横方向の変形範囲mbを求めている。
3.2.3 局所的な形状操作
局所的な形状操作については,式(13)~(15)で求めたma,mbを変形範囲とした4次曲面の式(16)より変形の重みwを求めている。i,jの範囲指定により,変形は楕円の内側の範囲に限られる。例えば平面を変形した場合を図16に示す。
i:中心座標と範囲に含まれるサンプル点とのY成分の中心の距離
j:変形の中心ラインからの位置
式(17)では, 変形の始点と終点を結んだ直線を,XY平面へ投影した直線とX軸のなす角α,及び,ZX平面へ投影した直線とX軸のなす角β,変形の大きさh,前式で求めた重みwをパラメータとして,
変形後のサンプル点の座標値xh,yh,zhを求めている。
x、y、z:変形前のサンプル点の座標値
γ' :ラインの刻み角度とライン数の積
3.2.4 デザインの視覚的評価
ここまでの形状操作では,変形に要する処理時間短縮のためサンプル点を用いて操作と表示を行ってきた。しかし,大きなポリゴンで表示された物体では,実際の製品のイメージをつかむ事は困難であるため,形状操作後,B-スプライン曲面によるフィッティングを行い視覚的な評価を行っている。図17(曲面フィッティング)は曲面フィッティングによって得られたデータより,細かなポリゴンで滑らかな曲面を表示した物体の例である。
さらに,実際の製品に加飾される文様を,図18(伝統工芸品へのテキスチャマッピング)のように物体表面にテキスチャマッピングすることで,製作者のイメージに合った文様を選ぶことができる。マッピングについては,形状操作と同様に,サイバーグローブの指先による接触判定により,対角線上の2点を指定することで,矩形範囲の部分マッピングが可能である。
|
|
|
|