 2.2.1 VRシステム
2.2.1 VRシステム本研究で用いたVRシステムはINTERGRAPH社パーソナルワークステーション(TD-30)にアクセラレータボードやビデオボードを搭載し、入出力機器にサイバーグローブとクリスタルアイを備えたシステムである。構成を図5に示す。また、ソフトウェアは米国SENSE8社のWTK(World Tool Kit)であり、VRを実現するために650近いC関数ライブラリを持っている。
2.2 VRによる対話的形状操作
2.2.1 VRシステム
本研究で用いたVRシステムはINTERGRAPH社パーソナルワークステーション(TD-30)にアクセラレータボードやビデオボードを搭載し、入出力機器にサイバーグローブとクリスタルアイを備えたシステムである。構成を図5に示す。また、ソフトウェアは米国SENSE8社のWTK(World Tool Kit)であり、VRを実現するために650近いC関数ライブラリを持っている。
2.2.2 仮想空間上のオブジェクトに対する形状操作
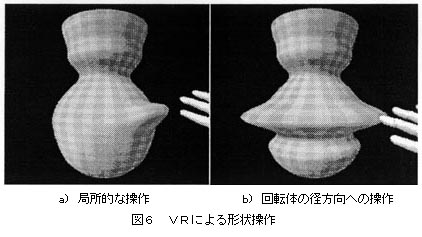
仮想空間上のオブジェクトに対する形状操作は、図6に示すように、サイバーグローブの指先が触れた物体の一部分を変形させる局所的な形状操作と、回転体の径方向に一様に変形させる形状操作とが可能である。ここでは、変形が複雑な局所的な形状操作について述べる。
形状操作には、変形の位置、範囲、大きさ、方向などのパラメータが必要である。
サイバーグローブと物体との接触判定は、各指で行うことも可能だが、処理時間が掛かるため、指定した1本の指で行う。また、変形範囲の決定は、図7のように伸ばしている指の本数を用い、変形範囲の縦横の比率は手の角度によって決定する(図8)。
さらに、変形の大きさは、図9に示すように、変形ベクトルを定義し、大きさhと方向α、βは、物体とサイバーグローブの接した座標Oと、サイバーグローブが移動した最終座標Pによって決定する。
 2.2.3 デザインの視覚的評価
2.2.3 デザインの視覚的評価
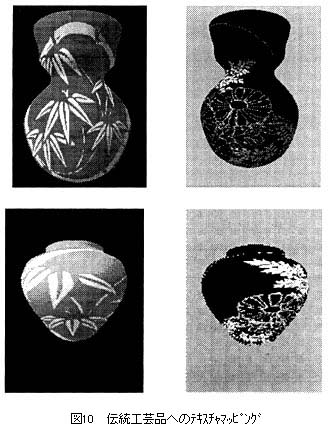
実際の製品に加飾される文様を、図10のように物体表面にテキスチャマッピングすることで、製作者のイメージに合った文様を選ぶことができる。マッピングについては、形状操作と同様に、サイバーグローブの指先による接触判定により、対角線上の2点を指定することで、矩形範囲の部分マッピングが可能である。また、本システムでは、サイバーグローブの指先で仮想空間中の対象物体に触れることで、形状操作を行っているが、対象物体と指先との位置関係や、触感が利用者にフィードバックされないため、操作が困難な場合がある。これらを解決する方法として、物体に触れた位置や変形範囲を色で表示することにより、利用者に的確な視覚情報を与えることで、操作性の向上を実現した。
3.結果
本研究では、伝統工芸品等の形状を高精度に計測し、計測した物体やCGから作成したモデリング物体を仮想空間上に置き、サイバーグローブを用いて直接的に形状操作を行えるシステムについて述べた。主な成果をまとめると以下のようである.
(1)既存の工芸品の形状入力に関しては、多視点からの形状データをリアルタイムで合成することにより、セルフオクルージョンを考慮した高精度な形状入力(計測誤差が0.3mm以下)が可能になった。
(2)形状操作に関しては、従来からの主流であった自由形状の制御点や重みを数値的に変化させる間接的な形状操作に対して、VRの入力装置であるサイバーグローブを用いて「押す」、「引っ張る」の動作により直接的に形状を変化させることが可能になった。
(3)サイバーグローブによるテキスチャマッピングの位置の直接的な指定により、伝統工芸の文様パターンの自由なマッピングが可能になった。
(4)形状操作の正確な位置を視覚的に利用者に伝えることで操作性の向上が図られた。以上のことより、伝統工芸品試作のための総合的なデザイン評価システムが実現できた。
今後の課題として、複雑な形状操作にさらに柔軟に対応できるように、使いやすいユーザインターフェースを実現することである。例えば、陶磁器製品の形状操作を行うための「バーチャル轆轤」をイメージした入力装置の開発等である。また、物体への接触などの操作感覚を力覚フィードバックすることにより、よりリアルな形状操作も実現していきたい。
さらに、本システムを単に伝統工芸品の外観的なデザイン評価システムではなく、形状操作後の形状データをCADデータに変換し、立体造形装置等により実際に形状を再構成させる試作評価システムまで発展させていきたい。
参考文献
| 1) | 亀山研一:スタイリングCAD,Human Interface,Vol.12, No.2,pp171‐174 (1997) |
| 2) | 中野幸一,渡辺弥壽夫:VRによる伝統工芸デザイン支援システムの開発, Human Interface, Vol.12, No.2,pp199 - 206 (1997) |
| 3) | 木下,中野,渡辺:仮想空間構築のための3次元物体入力と形状モデリング,第40回自動制御連合講演会, 447/448(1997) |
|
|
|