
写真1 ファジィ張力制御システムの装着例
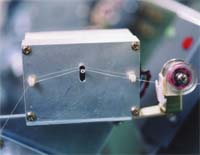
写真2 張力センサ

写真3 張力テンサ
図2 張力テンサの内部構造
図3 メンバーシップ関数
2.試作したファジィ張力制御システム
2.1 ファジィ張力制御システムの構成
写真1 ファジィ張力制御システムの装着例 |
写真2 張力センサ |
写真3 張力テンサ |
図2 張力テンサの内部構造 |
図3 メンバーシップ関数 |
2.2 張力センサ
製織準備工程において,正確な張力検出を行うためには,製織準備機のすべての糸に張力センサを取り付ける必要がある。しかし,製織準備機は,同時に多くの糸本数を取り扱うため,従来の張力センサでは,コスト高になる問題点があった。そこで,低コストな張力センサを考案するため,検出部にホール素子を用いた。試作した張力センサは,ホール素子,コイルバネ,セラミックアーム,及び2個の糸ガイドで構成され,張力値に応じたセラミックアームの角位置によって,ホール素子からの出力電圧値が変化し,張力が測定できる。試作した張力センサの測定レンジは0〜100cNで,衣料から非衣料素材にまで対応できるようにした。試作した張力センサを写真2に示す。
2.3 張力テンサ
製織準備工程における,急激な張力変動に対応するため,ロータに内蔵してある永久磁石と電磁石の吸引力を用いて張力を作用させる応答性の良い張力テンサを試作した。この張力テンサの最大作用張力は,糸速度300m/min
で50cNである。試作した張力テンサを写真3に,その構造を図2に示す。
2.4 ファジィ張力制御方法
開発したファジィ制御プログラムは,C言語を使用して作成した。ファジィ理論のメインプログラムは,Mamdani の方法により,ファジィルール,メンバーシップ関数の作成,ルールの修正,シミュレーション画面からなるルーチンプログラムで構成した。ファジィ推論部では設定張力,張力の時間変化を入力変数とし,張力テンサ電圧を出力として,演算を行うことができる。このシステムは,張力センサによって測定された張力が入力値X1,その際の張力の時間変化が入力値X2として,それぞれがメンバーシップ関数に変換された形で系に取り込まれる。得られた入力値とルールに対応するメンバーシップとで,min-max
演算を行い適合値を求めた。得られた適合値はルールの結論部において適切な頭切り処理を行った。次にルールごとに頭切りの行われた結論部メンバーシップを合成した後,最後にこれらの合成されたメンバーシップの重心値を求めて出力値Yとした。
開発したファジィ張力制御プログラムでは,入力数2,出力数1,メンバーシップ関数3を用いた。メンバーシップ関数を図3に示し,ファジィルールとメンバーシップ関数の形状条件を表1(a),(b)に示す。
| Input value 2 | ||||
| NB | ZR | PB | ||
| Input value 1 | NB | PB | PB | ZR |
| ZR | PB | ZR | NB | |
| PB | ZR | NB | NB | |
| a | b | c | d | ||
| Input value 1 | NB | 0 | 0 | 60 | 128 |
| ZR | 60 | 128 | 128 | 196 | |
| PB | 128 | 196 | 255 | 255 | |
| Input value 2 | NB | 0 | 0 | 60 | 128 |
| ZR | 40 | 128 | 128 | 216 | |
| PB | 128 | 196 | 255 | 255 | |
| output value | NB | 0 | 0 | 60 | 128 |
| ZR | 60 | 128 | 128 | 216 | |
| PB | 128 | 196 | 255 | 255 | |
|
|
|
|